
北京航空航天大学的研究人员已经开发出一种机器人无人驾驶飞机能在水下操作一样容易在空气中没有修改。
无人机是防水,有一组自折叠式螺旋桨在水下操作在较低速度时崩溃的有效操作无人机时淹没。然后自动扩展无人机转换需要水和空气。它可以在三分之一的过渡,可以完成连续七水气转换在20秒。

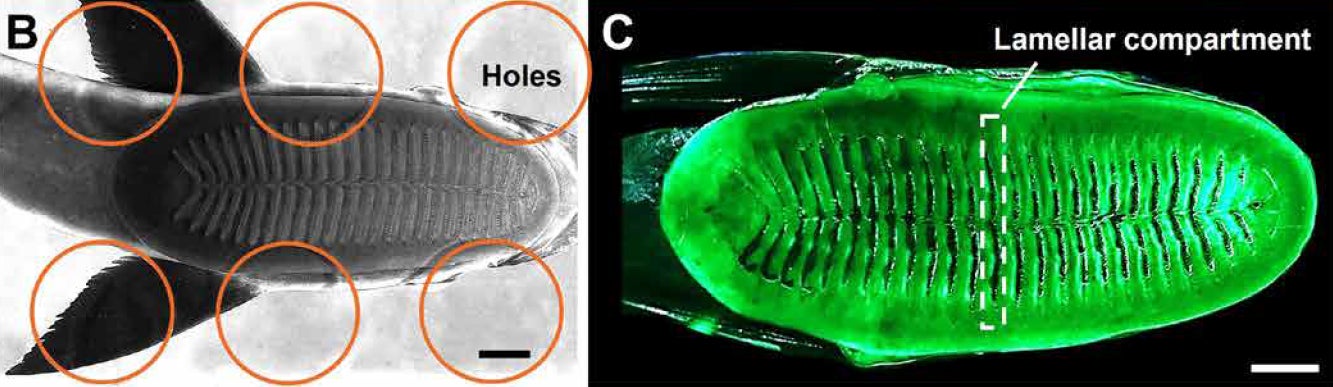
内置冗余,允许它继续坚持即使表面接触部分灵感来自鮣鱼鱼。
团队能够创造一个人工版本的鮣鱼鱼的吸入阀瓣通过基础课的方法。她们将上面一层超灵活和更多的刚性结构下,随着一层网络的小通道时,可以膨胀的充满液体的泵,更换生活肌肉组织进行进一步加强吸的片晶结构。
像鮣鱼鱼,无人机可以,至少在理论上,发现自己一个水下主机(它没有立即吓跑了一个旋转的螺旋桨)并附上本身免费,只需要吸入机制驱动的,这是一个最小的排水板载电池。
吸的更合理的使用机制作为一种暂时栖息的无人驾驶飞机的地方的理想优势长期观测。无人机可以依附在岩石或日志和关闭发动机,同时推动传感器和摄像机。一样的水线以上就可以完成,无人机飞行起来,坚持本身的高楼或底部风力涡轮机的发动机舱,和实施测量和其他数据收集不使用battery-draining汽车。

{kind=link}