
在一个纸周三在同行评审期刊上发布自然,研究人员提出了一种量化和比较“跳线”的简单方法。无论是生活还是无生命。
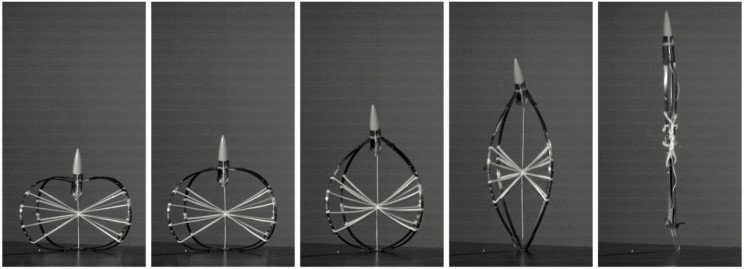
他们写道:“遵循这些见解,我们创建了一个可以跳30多个的设备?据我们所知,高于以前的工程跳线,并且比最佳的生物跳跃器高的数量级高。”
他们的套头衫的高度不到一英尺(30厘米),重量仅超过一盎司(30 g),可以向空中发射108英尺(33 m),起飞速度为92英尺(28 m)每秒。
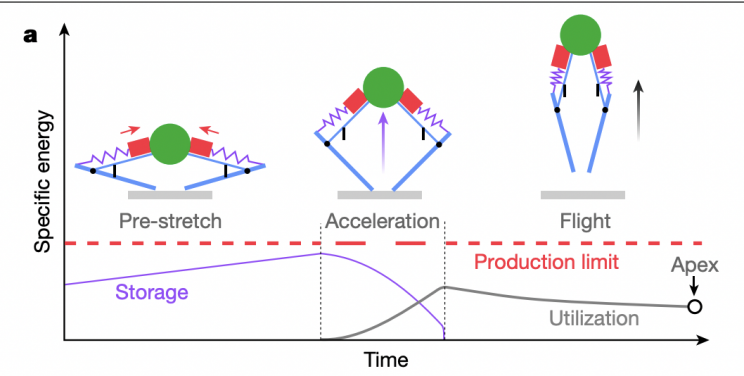
跳动工程师和进化,以面对发电的一些基本物理局限性。机械工程师莎拉·伯格雷特(Sarah Bergbreiter)在与论文中发表的透视图中写道:“肌肉和电动机无法产生所需的高功率输出。”自然。她写道,生活和工程系统都通过使用“肌肉和电动机在春季般的结构中存储能量”,然后以一种称为闩锁介导的春季驱动的方法来释放能量,从而遍及此极限。
Bergbreiter说:“工程机器人中通常发现的旋转电动机可以通过充当绞车来克服[这些局限性],以在不需要更大的电动机的情况下提供更大的位移,从而增加工作密度,从而提高工作密度。”“只要旋转电动机可以继续旋转,工程系统就会受到弹簧的能量密度(存储能量)的限制。”
还发现,橡皮筋和碳纤维弹簧的混合物可以储存每个质量的大量能量。
“This unexpectedly high ratio between spring and motor mass is a result of the relative energy limitations of these components: the energy density of the spring limits the robot’s jump height, whereas the work density of muscle limits the amount of energy that biological jumpers can store in their springs,” Bergbreiter explains.

{kind=link}